Foto: Volvo hat einen Ausweichassistenten entwickelt.
Volvo arbeitet an einem Ausweichassistenten, der in einer Notsituation automatisch einen sicheren, kollisionsfreien Weg einschlägt. Dank der Fusion von verschiedenen Sensoren erzeugt die neue Technik eine nahtlose 360-Grad-Rundumsicht um das Fahrzeug. Entstanden ist dieses Schlüsselsystem im Rahmen des „Non-Hit Car and Truck Projekts“. Es ist Teil der Vision 2020: Ab dem Jahr soll niemand mehr in einem neuen Volvo bei einem Verkehrsunfall getötet oder schwer verletzt werden.

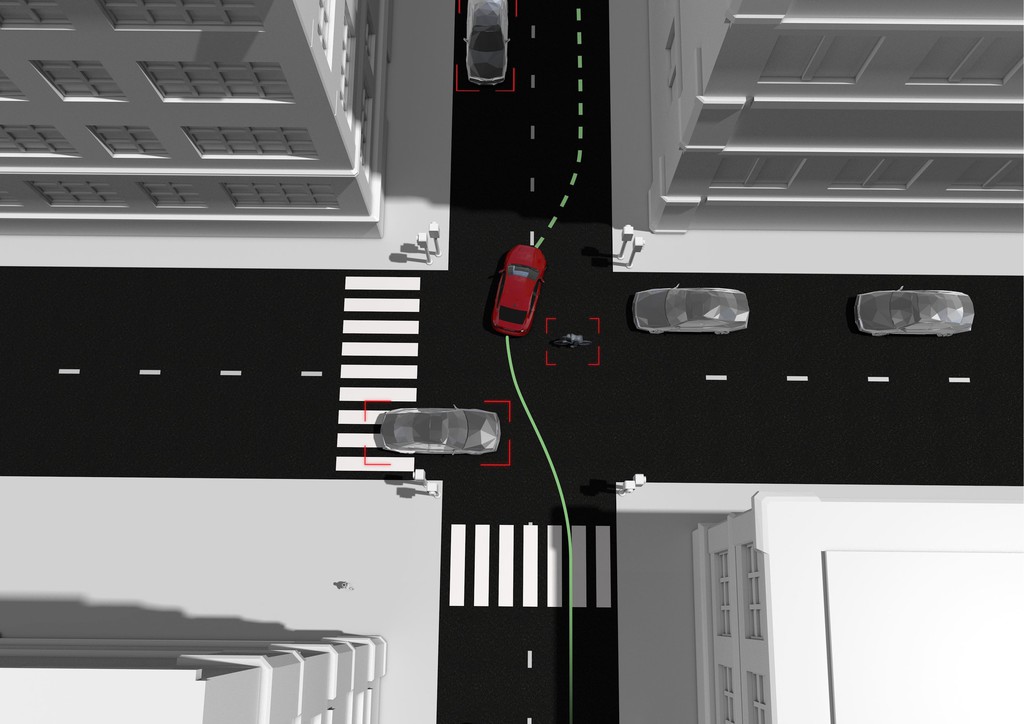
Volvo hat eine nahtlose 360-Grad-Rundumsicht um das Fahrzeug entwickelt.
Eine der größten Herausforderungen bei der Entwicklung des Systems ist es, aus einer Vielzahl von Sensoren, die rund um das Fahrzeug angeordnet sind, ein zusammenhängendes Erkennungsbild zu produzieren. Dazu ist eine zentrale Steuereinheit erforderlich, die zum einen den effizienten Informationsaustausch zwischen den diversen Quellen – Kameras, Radar, Laser, GPS etc. – ermöglicht und zum anderen die Informationen der verschiedenen Quellen analysiert und verarbeitet. So ist das System in der Lage, eine komplette 360-Grad-Sicht der Fahrzeugumgebung zu erzeugen und dabei alle potenziell gefährlichen Objekte zu erfassen, die der Fahrer normalerweise nicht sehen könnte, und hindernisfreie Fluchtwege zu lokalisieren. Dieses mit Software-Unterstützung arbeitende Feature analysiert kontinuierlich die Fahrzeugumgebung und kann den Fahrer zudem per Notbremsfunktion und automatischem Lenkeingriff unterstützen.
Zur Veranschaulichung der Funktionsweise wurden im Rahmen des Projekts zwei Testfahrzeuge gebaut. (ampnet/jri) Fotos: Auto-Medienportal.Net/Volvo